SLAM분야에서는 Calibration등의 과정에서 두 프레임이 주어졌을때 transformation matrix를 구해야하는 상황이 흔히 발생한다.
하지만 transformation의 기준, 예를들어 Transformation from camera to body-frame이 어떤것을 나타내는지는 오픈소스의 저자마다 axis기준인지 point기준인지 다를수 있어 주의가 필요하다.
1. Concept
VINS-Mono의 config를 보면
#Rotation from camera frame to imu frame, imu^R_cam
extrinsicRotation: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 0.9995004, 0.03139202, 0.00367391,
-0.03143884, 0.99941494, 0.01346765,
-0.00324898, -0.01357642, 0.99990256]
#Translation from camera frame to imu frame, imu^T_cam
extrinsicTranslation: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [0.00500934, -0.00600253, 0.04180872]
\(T^i_c\)를 나타내고 있으며, Kalibr가 내놓은 결과의 T_ic와 동일하다
하지만 ORB-SLAM3의 config를 보면
# Transformation from body-frame (imu) to left camera
IMU.T_b_c1: !!opencv-matrix #
rows: 4
cols: 4
dt: f
data: [-0.999926331416774, -0.004903922475695, 0.011103300578872, 0.010699210334022,
0.004934127578069, -0.999984196594937, 0.002694614150709, -0.000052795150761,
0.011089910930019, 0.002749200743896, 0.999934725755053, -0.000118662002204,
0.0, 0.0, 0.0, 1.0]
이 역시 \(T^i_c\)를 나타내는데, 설명하고 있는 문구가 다른 것을 볼 수 있다.
T_b_c1과 같이 앞에 오는 것이 보통 기준이 되는 프레임, 즉 위의 프레임이므로 문구보다는 변수명으로 보는것이 좋다.
추가적으로, rostopic에서 주는 tf 메세지는 frame_id, child_frame_id가 있는데 frame_id가 기준이 되는 즉 변수에서 위에 오는 부분이 된다.
한편, \(T_b^c\)를 구하기 위해 Axis를 기준으로 생각해 볼 때는 아래와 같이 rotation matrix를 계산한다.
[Body frame] = R * [Camera frame]
Translation은 어떤 frame을 기준으로 움직이느냐에 따라 추가하면 된다.
예를들어 body frame기준으로 x=1m가 camera frame까지 차이가 난다면,
[Camera frame] = T * [Body frame]에서 Body frame의 T matrix의 translation 부분의 x값을 1m 입력해주면 된다.
이를 종합하여 볼 때, axis를 기준으로 할때 translation이 어떤 frame기준인지 먼저 잘 살펴보고, rotation의 기준도 동일하게 정해주는 것이 좋다.
2. Rotation Matrix
roll : x축 기준 회전
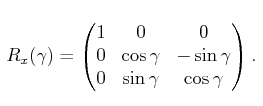
pitch : y축 기준 회전
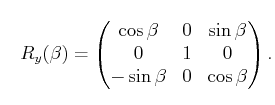
yaw : z축 기준 회전
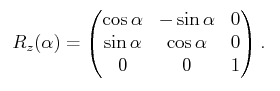
roll → pitch → yaw순으로 회전한다.
3. Example
Camera frame TF :
IMU frame TF :

위 두 frame의 Translation이 body기준으로 1m차이 난다고 주어졌다고 가정하자.
만약 Transformation Camera to body(IMU)을 구해야 하더라도, body기준으로 값이 주어졌기 때문에 Transformation body to Camera를 먼저 구하고 inverse해주는 것이 더 편리하다.
Body기준으로 roll 방향 90도, pitch방향 -90도 회전하면 camera frame을 구할 수 있으므로,
(counterclockwise 기준, 왼손법칙)
Transformation from body to camera-frame (axis 기준)는 다음과 같이 구할 수 있다.
\[T_c^b = \begin{pmatrix} 0 & -1 & 0 & 1 \\ 0 & 0 & -1 & 0 \\ 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}\]따라서 원래 구하려던 Transformation from camera to body-frame (axis 기준)를 구하려면 이를 inverse해주면 된다.
\[T_b^c= \begin{pmatrix} 0 & 0 & 1 & 0 \\ -1 & 0 & 0 & 1 \\ 0 & -1 & 0 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}\]※ 계산해주는 tools site : https://www.andre-gaschler.com/rotationconverter/
transformation matrix를 구할 때 위 site를 이용하여 Rotation의 각도 차이를 적어주어 구하면 편리하다.
- 위 사이트에서 예시를 적용하기 위해서는 Euler angles of multiple axis rotations (radians)의 ZYX순서로 rotation을 계산하여야 한다.